
未来,一切可视化, 未来,已来
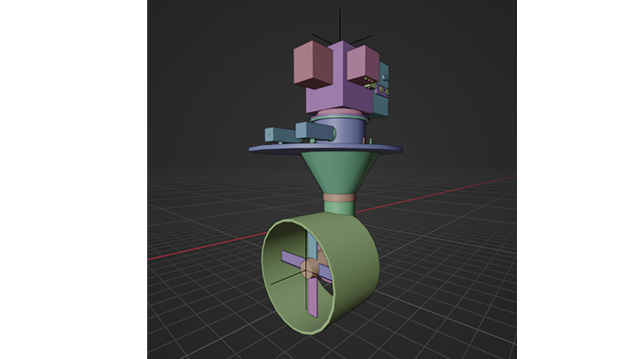


全回转主推舵浆,是一种先进的海工与船舶推进系统,为船舶提供卓越的操纵灵活性。全回转主推舵浆采用创新的力学结构设计和工程技术,旨在满足海工船舶海洋工程作业、行驶过程中的各项需求。
360度全方位操纵能力:全回转主推舵浆具备360度全方位旋转能力,使海工船舶能够实现前进、后退、侧向移动和旋转等多种运动状态。灵活性使得船舶可以在狭小的水域和拥挤的港口中精确操控,提高了操作效率和安全性。
卓越操纵性能:全回转主推舵浆通过液压或电动机驱动,可快速调整推力方向和大小。这种高度响应的操纵性能意味着船舶可以迅速应对不同的操控要求,包括紧急情况下的快速停泊和水上精确定位。
降低转向半径:全回转主推舵浆的设计可以显著降低海工船舶的转向半径。这意味着海工船舶可以在狭小的水域中更容易地转向和导航,同时提高了航行安全性和操作效率。
增强稳定性:全回转主推舵浆的使用可以增加船舶的稳定性,尤其是在恶劣海况下,能够在操纵过程中产生较强的侧向推力,帮助船舶抵御侧风和侧流的影响,保持航向稳定。
海工绘全回转主推舵浆广泛应用于各类海工船舶,包括深远海风电作业船、铺管船、挖泥船、客船、货船和拖船等,被广泛用于海洋工程、港口作业、救援行动等海工领域。海工绘持续改进设计和创新,以满足不断变化的航运需求,为客户提供可靠、高性能的船舶推进系统解决方案。

全回转主推舵浆具备360度全方位旋转能力,使船舶可以实现前进、后退、侧向移动和旋转等多种运动状态。

全回转主推舵浆采用液压或电动机驱动,能够快速调整推力方向和大小。

全回转主推舵浆的设计可以显著降低船舶的转向半径,提高航行安全性和操作效率。

全回转主推舵浆的使用可以增加船舶的稳定性,它能够产生较强的侧向推力,帮助船舶抵御侧风和侧流的影响,保持航向稳定。
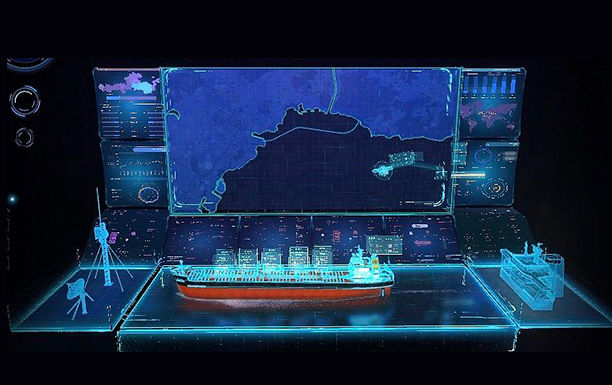
结合智能可视化系统,船舶的当前位置可以实时显示在船上的监控屏幕上。
通过智能可视化系统,船员可以监测船舶的倾斜角度、横摇、纵摇等姿态参数。
智能可视化系统可以配备雷达或摄像头等传感器,用于检测周围的障碍物。
可以利用智能可视化系统对船舶的船体状况进行实时监测。例如,检测船体的应力和变形情况。
智能可视化系统可以监测船舶的推进效率,并提供实时数据和图表显示。
结合智能可视化系统,可以设计出直观、易用的交互式操控界面。
通过安装GPS定位系统和传感器,智能可视化系统可以实时获取船舶的位置信息。这些数据将被传输到智能可视化系统中,通过图表、地图或虚拟界面显示船舶的精确位置和轨迹。
智能可视化系统利用机器学习算法和传感器数据对目标进行跟踪和分析。结合全回转主推舵浆的控制能力,系统可以根据目标的位置、速度和加速度等参数,预测目标的未来行动,并相应地调整推进力以保持安全距离。

智能可视化系统利用地图数据、水深和其他航行条件等信息,结合全回转主推舵浆的操纵能力,计算出最佳路径和导航建议。这些指令将通过界面显示给操作人员,帮助他们做出正确的导航决策。

智能可视化系统通过分析周围船只的位置和速度,使用雷达、摄像头或其他传感器来检测潜在的碰撞风险。当有碰撞风险时,系统会发出警报,并使用全回转主推舵浆调整船舶的速度和航向,以避免与其他船只发生碰撞。
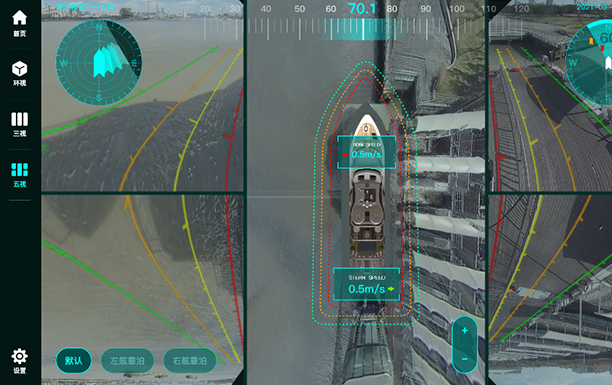
智能可视化系统通过识别码头或目标位置的特征,并结合全回转主推舵浆的精确操纵能力,计算并发送船舶需要采取的操作指令。这些指令可能包括推进力、航向和位置的调整,以便将船舶准确停靠或对接到目标位置。

智能可视化系统使用传感器和监测设备来检测船舶的工作状态和环境变化。当系统检测到异常情况(如海况突变、设备故障等),它会立即发出警报,并利用全回转主推舵浆的操纵能力进行相应的调整,以确保船舶在各种情况下的安全性和稳定性。

Copyrights © 2018 启明天工(苏州)海洋科技有限公司 苏ICP备2023037922号-2 技术支持:苏州网站建设
 苏公网安备 32050502000740
苏公网安备 32050502000740



